阅读短文,回答问题
无人航拍机
无人驾驶飞机简称“无人机”是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。如图甲所示是目前较为流行的某型号无人航拍机,当剩余电量减为电池容量的10%时,无人航拍机会自动下降并停留地面等待充电。表一为某型号无人航拍机的部分参数,其中的电池容量是指放电电流与放电总时间的乘积。
表一
| 额定电压/V | 6 | 额定功率/W | 42 |
| 电池容量/mAh | 1500 | 工作噪音/dB | <50 |
| 遥控距离/m | 200 | 整机质量/g | 500 |
| 充电时间/min | 200 | 电机转化效率/% | 90 |
无人机有竖直方向的三档风力和水平方向的两档风力,其中竖直方向的升力与风叶转速的平方成正比,对应关系如表二。产生的升力与风叶转速之比叫做动率,升力与每秒钟通过风叶空气重力之比为转力效率。
表二
| 风叶转速/( | 1 | 1.2 | 1.4 |
| 升力/N | 4 | ||
| 动率/( | 1 |
(1)无人航拍机在空中悬停、飞行、降落、航拍、降落过程中,下列说法中正确的是________。
A.利用超声波对无人机进行遥控的
B.底座做得比较宽大,是为了减小无人机对地面的压力
C.工作时发出的声音不会对人的听力造成损伤
D.用镜头的焦距要尽量长一点
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,增大了无人机向上的升力。这是利用______,当风叶转速为![]() 时,获得的向上的升力为_________N。
时,获得的向上的升力为_________N。
(3)该无人机正常工作时的电流为________A;充满电后至下一次自动充电,能够提供无人机工作的机械能为___________J。
(4)由表二数据可知,当转速为![]() 时,无人机的动率为________
时,无人机的动率为________![]() 。上述转速下,若风叶的转圈时扫过的面积为
。上述转速下,若风叶的转圈时扫过的面积为![]() ,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为_____kg,转力效率为__________%。(
,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为_____kg,转力效率为__________%。(![]() )
)
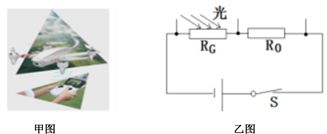
(5)光敏电阻是制作感光器材的常用元件,其阻值随受光强度的增加而减少。在无人机的航拍镜头中,加入光敏电阻电路可自动控制进入镜头的光强度,电子镜头的透光能力随着受控电压的增加而增加。如图乙所示,![]() 为光敏电阻,
为光敏电阻,![]() 为定值电阻,无人机的航拍镜头中将电子镜头电路与__________(光敏/定值)电阻相并联。
为定值电阻,无人机的航拍镜头中将电子镜头电路与__________(光敏/定值)电阻相并联。
答案
C 力的作用是相互的 5.76 7 ![]() 5.6 65.52 71.8% 光敏
5.6 65.52 71.8% 光敏
【解析】
(1)A. 无人机利用无线电进行遥控的,而不是超声波,故A错误;
B.底座做得比较宽大,是为了无人机更容易平稳着陆,保证稳定性,故B错误;
C.工作时发出的声音小于50dB,所以不会对人的听力造成损伤,故C正确;
D.摄像机的镜头相当于一个凸透镜,其成像的原理是:当物距大于二倍焦距时,凸透镜成倒立缩小的实像;当物距增大时,像距减小,也就是当无人机高度上升时增大了物距,这时需减小镜头与感光晶片的距离,所以焦距并非越长越好,才能拍摄到清晰的画面,故D错误。
(2)起飞时,增大风叶的转速,使吹向下方的风量增加,风给直升机一个反作用力进而增大了无人机向上的升力,这是利用力的作用是相互的原理;其中竖直方向的升力与风叶转速的平方成正比,所以可列:F升=kr转2,对应关系如表二,当升力为4N时,转速为![]() ,代入上式可知k=4,F升=4r转2①,所以当风叶转速为
,代入上式可知k=4,F升=4r转2①,所以当风叶转速为![]() 时,代入公式①可知,获得的向上的升力为5.76N。
时,代入公式①可知,获得的向上的升力为5.76N。
(3)该无人机正常工作时额定电压6V,额定功率为42W,根据P=UI可知该无人机正常工作时的电流为![]() ;充满电后电量为1500 mAh=1.5Ah,当剩余电量减为电池容量的10%时,无人航拍机会自动下降并停留地面等待充电,所以至下一次自动充电用时为
;充满电后电量为1500 mAh=1.5Ah,当剩余电量减为电池容量的10%时,无人航拍机会自动下降并停留地面等待充电,所以至下一次自动充电用时为![]() ,耗时能够提供无人机工作的机械能为(电机转化率为90%):
,耗时能够提供无人机工作的机械能为(电机转化率为90%):![]() 。
。
(4)根据F升=4r转2,由表二数据可知,当转速为![]() 时,无人机的升力为7.84N,又因为产生的升力与风叶转速之比叫做动率,所以动率为
时,无人机的升力为7.84N,又因为产生的升力与风叶转速之比叫做动率,所以动率为![]() ;上述转速下,若风叶的转圈时扫过的面积为
;上述转速下,若风叶的转圈时扫过的面积为![]() ,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为
,空气被吹动的速度为3m/s,则1min内通过风叶的空气总质量为![]() ,因为升力与每秒钟通过风叶空气重力之比为转力效率,每秒钟通过风叶空气重力为所以转力效率:
,因为升力与每秒钟通过风叶空气重力之比为转力效率,每秒钟通过风叶空气重力为所以转力效率: 。
。
(5)如图乙所示,![]() 为光敏电阻与
为光敏电阻与![]() 为定值电阻串联,根据串联分压原理以及实际拍摄时为了保持清晰,当外界环境光线较强时,无人机的航拍镜头中将电子镜应减小透光能力(即减小受控电压,此时所并联的电阻应减小),当外界环境光线较弱时,无人机的航拍镜头中将电子镜应增大透光能力(即增大受控电压,此时所并联的电阻应增大),又因为光敏电阻的阻值随受光强度的增加而减少,而无人机的航拍镜头透光能力随着受控电压的增加而增加,所以电子镜头电路应该与光敏电阻相并联。
为定值电阻串联,根据串联分压原理以及实际拍摄时为了保持清晰,当外界环境光线较强时,无人机的航拍镜头中将电子镜应减小透光能力(即减小受控电压,此时所并联的电阻应减小),当外界环境光线较弱时,无人机的航拍镜头中将电子镜应增大透光能力(即增大受控电压,此时所并联的电阻应增大),又因为光敏电阻的阻值随受光强度的增加而减少,而无人机的航拍镜头透光能力随着受控电压的增加而增加,所以电子镜头电路应该与光敏电阻相并联。